首先我们来关注一个问题:
问题描述:
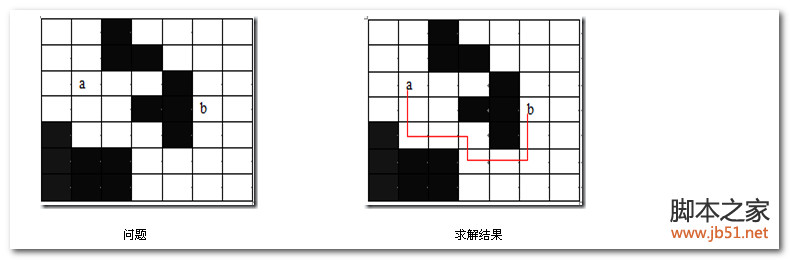
布线问题:印刷电路板将布线区域划分成n×m个方格阵列,要求确定连接方格阵列中的方格a的中点到方格b的中点的最短布线方案。在布线时,电路只能沿直线或直角布线,为了避免线路相交,已布了线的方格做了封锁标记,其他线路不允许穿过被封锁的方格。如下图所示:
算法思路:
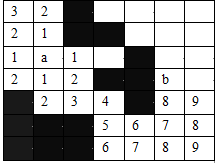
布线问题的解空间是一个图,则从起始位置a开始将它作为第一个扩展结点。与该扩展结点相邻并可达的方格成为可行结点被加入到活结点队列中,并且将这些方格标记为1,即从起始方格a到这些方格的距离为1。接着,从活结点队列中取出队首结点作为下一个扩展结点,并将与当前扩展结点相邻且未标记过的方格标记为2,并存入活结点队列。这个过程一直继续到算法搜索到目标方格b或活结点队列为空时为止。
在实现上述算法时,
(1) 定义一个表示电路板上方格位置的类Position。
它的2个成员row和col分别表示方格所在的行和列。在方格处,布线可沿右、下、左、上4个方向进行。沿这4个方向的移动分别记为0,1,2,3。下表中,offset[i].row和offset[i].col(i= 0,1,2,3)分别给出沿这4个方向前进1步相对于当前方格的相对位移。

(2) 用二维数组grid表示所给的方格阵列。
初始时,grid[i][j] = 0, 表示该方格允许布线,而grid[i][j] = 1表示该方格被封锁,不允许布线。
算法图解:
代码贴出来:
复制代码 代码如下:
#include <stdio.h>
typedef struct {
int row;
int col;
}Position;
int FindPath (Position start, Position finish, int &PathLen, Position *&path)
{ //计算从起始位置start到目标位置finish的最短布线路径,找到返回1,否则,返回0
int i;
if ((start.row = = finish.row) && (start.col = = finish.col)) {
PathLen = 0; return 0; } //start = finish
//设置方格阵列”围墙”
for (i = 0; i <= m+1; i++)
grid[0][i] = grid[n+1][i] = 1; //顶部和底部
for (i = 0; i <= n+1; i++)
grid[i][0] = grid[i][m+1] = 1; //左翼和右翼
//初始化相对位移
int NumOfNbrs = 4; //相邻方格数
Position offset[4], here, nbr;
offset[0].row = 0; offset[0].col = 1; //右
offset[0].row = 1; offset[0].col = 0; //下
offset[0].row = 0; offset[0].col = -1; //左
offset[0].row = -1; offset[0].row = 0; //上
here.row = start.row;
here.col = start.col;
LinkedQueue <Position> Q; //标记可达方格位置
do {
for (i = 0; i< NumOfNbrs; i++) { //标记可达相邻方格
nbr.row = here.row + offset[i].row ;
nbr.col = here.col + offset[i].col;
if (grid[nbr.row][nbr.col] = = 0) { //该方格未标记
grid[nbr.row][nbr.col] = grid[here.row][here.col] + 1;
if ((nbr.row = = finish.row) && (nbr.col = = finish.col)) break;//完成布线
Q.Add(nbr);
}
}
if ((nbr.row = = finishi.row) && (nbr.col = = finish.col)) break;//完成布线
if (Q.IsEmpty()) //活队列是否为空
return 0; //无解
Q.delete(here); //取下一个扩展结点
}while (1);
//构造最短布线路径
PathLen = grid[finish.row][finish.col] - 2;
path = new Position[PathLen];
here = finish;
for (int j = PathLen – 1; j >= 0; j--) { //找前驱位置
path[j] = here;
for (i = 0; i< NumOfNbrs; i++) {
nbr.row = here.row + offset[i].row ;
nbr.col = here.col + offset[i].col;
if (grid[nbr.row][nbr.col] = = j+2) break;
}
here = nbr; //向前移动
}
return 1;
}
void main ()
{
int grid[8][8];
int PathLen, *path;
Position start, finish;
start.row = 3; start.col = 2;
finish.row = 4; finish.col = 6;
FindPath (start, finish, PathLen, path);
}
代码贴出来:
复制代码 代码如下:
#include <stdio.h>
typedef struct {
int row;
int col;
}Position;
int FindPath (Position start, Position finish, int &PathLen, Position *&path)
{ //计算从起始位置start到目标位置finish的最短布线路径,找到返回1,否则,返回0
int i;
if ((start.row = = finish.row) && (start.col = = finish.col)) {
PathLen = 0; return 0; } //start = finish
//设置方格阵列”围墙”
for (i = 0; i <= m+1; i++)
grid[0][i] = grid[n+1][i] = 1; //顶部和底部
for (i = 0; i <= n+1; i++)
grid[i][0] = grid[i][m+1] = 1; //左翼和右翼
//初始化相对位移
int NumOfNbrs = 4; //相邻方格数
Position offset[4], here, nbr;
offset[0].row = 0; offset[0].col = 1; //右
offset[0].row = 1; offset[0].col = 0; //下
offset[0].row = 0; offset[0].col = -1; //左
offset[0].row = -1; offset[0].row = 0; //上
here.row = start.row;
here.col = start.col;
LinkedQueue <Position> Q; //标记可达方格位置
do {
for (i = 0; i< NumOfNbrs; i++) { //标记可达相邻方格
nbr.row = here.row + offset[i].row ;
nbr.col = here.col + offset[i].col;
if (grid[nbr.row][nbr.col] = = 0) { //该方格未标记
grid[nbr.row][nbr.col] = grid[here.row][here.col] + 1;
if ((nbr.row = = finish.row) && (nbr.col = = finish.col)) break;//完成布线
Q.Add(nbr);
}
}
if ((nbr.row = = finishi.row) && (nbr.col = = finish.col)) break;//完成布线
if (Q.IsEmpty()) //活队列是否为空
return 0; //无解
Q.delete(here); //取下一个扩展结点
}while (1);
//构造最短布线路径
PathLen = grid[finish.row][finish.col] - 2;
path = new Position[PathLen];
here = finish;
for (int j = PathLen – 1; j >= 0; j--) { //找前驱位置
path[j] = here;
for (i = 0; i< NumOfNbrs; i++) {
nbr.row = here.row + offset[i].row ;
nbr.col = here.col + offset[i].col;
if (grid[nbr.row][nbr.col] = = j+2) break;
}
here = nbr; //向前移动
}
return 1;
}
void main ()
{
int grid[8][8];
int PathLen, *path;
Position start, finish;
start.row = 3; start.col = 2;
finish.row = 4; finish.col = 6;
FindPath (start, finish, PathLen, path);
}
好了,问题解出来了。咦,我们用的是什么方法呢?呵呵,对,这就是分支限界算法。
算法总结:
分支限界法基本思想:
• 分支限界法常以广度优先或以最小耗费(最大效益)优先的方式搜索问题的解空间树。
• 在分支限界法中,每一个活结点只有一次机会成为扩展结点。活结点一旦成为扩展结点,就一次性产生其所有儿子结点。
• 在这些儿子结点中,导致不可行解或导致非最优解的儿子结点被舍弃,其余儿子结点被加入活结点表中。
• 此后,从活结点表中取下一结点成为当前扩展结点,并重复上述结点扩展过程。这个过程一直持续到找到所需的解或活结点表为空时为止。
分支限界法与回溯法的不同:
(1)求解目标不同:回溯法的求解目标是找出解空间树中满足约束条件的所有解,而分支限界法的求解目标则是找出满足约束条件的一个解,或是在满足约束条件的解中找出在某种意义下的最优解。
(2)搜索方式的不同:回溯法以深度优先的方式搜索解空间树,而分支限界法则以广度优先或以最小耗费优先的方式搜索解空间树。
【算法详解之分支限界法的具体实现】相关文章:
★ 深入理解memmove()与memcpy()的区别以及实现方法